




















Researchers from Cornell and Brown University have created an advanced telepresence robot that can instantly and automatically react to a remote user’s motions and gestures in a virtual reality environment.
The robotic system is called VRoxy and allows a user in a confined area like an office, to engage in VR collaboration with colleagues located in a much larger space. VRoxy is the most recent development in a remote robotic embodiment by researchers at the Cornell Ann S. Bowers College of Computing and Information Science.
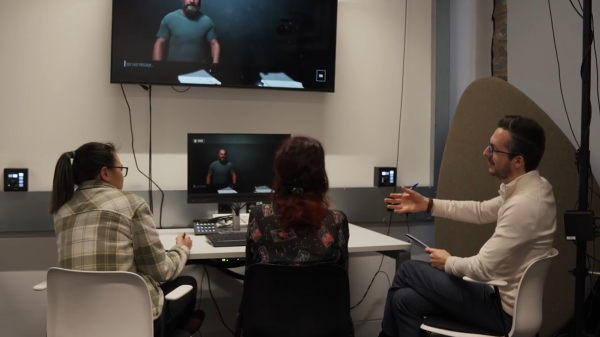
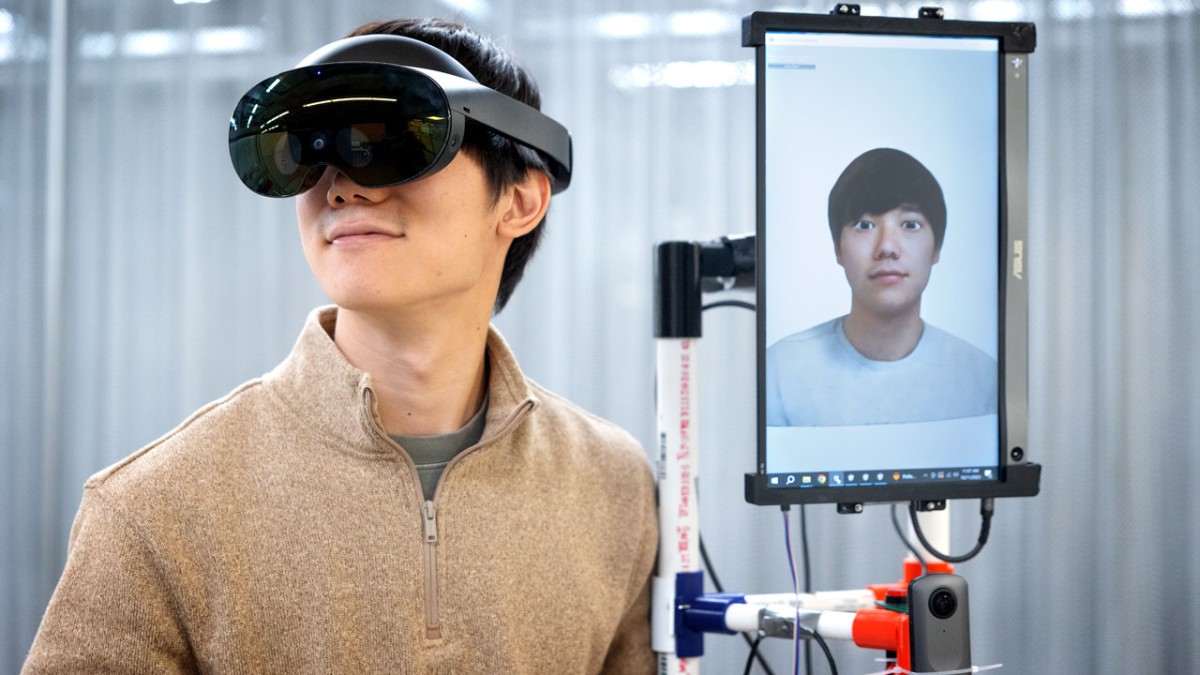
Mose Sakashita (pictured), a doctoral student in the field of information science said in a post, “The great benefit of virtual reality is we can leverage all kinds of locomotion techniques that people use in virtual reality games, like instantly moving from one position to another. This functionality enables remote users to physically occupy a very limited amount of space but collaborate with teammates in a much larger remote environment.”
The capability of VRoxy to respond automatically and instantly is crucial for both distant and nearby team members, according to the researchers. For teammates, VRoxy’s robot mimics the user’s body posture and essential nonverbal signals automatically, which are typically absent in telepresence robots and Zoom meetings.
A robotic evolution
According to the researchers, VRoxy is an evolution of a previous Cornell robot known as ReMotion, which required both the local and remote users to have identical hardware and workspace sizes. However, this limitation has been overcome with VRoxy which now translates slight movements made by remote users in VR into larger movements in the physical space.
VRoxy comes with a 360-degree camera, a monitor displaying the facial expressions captured by the user’s VR headset, a robotic pointing finger and wheels that can move in any direction.
When wearing a VR headset, a VRoxy user can choose between two viewing modes: ‘Live mode’ which provides an immersive real-time view of the collaborative space, facilitating interactions with nearby teammates and ‘Navigational mode’ which displays virtual pathways within the room, enabling remote users to, ‘Teleport’ to their desired locations, the researchers said.
In future developments, Sakashita intends to enhance VRoxy by adding robotic arms, enabling remote users to engage with physical objects within the live space using the robot proxy. Also, he envisions VRoxy being capable of independently mapping a space, similar to how a Roomba vacuum cleaner operates.
Presently, the system utilises ceiling markers to assist the robot in navigation. Expanding to real-time mapping could open the door for deploying VRoxy in educational settings, such as classrooms, he said. Sakashita is also the lead author of “VRoxy: Wide-Area Collaboration From an Office Using a VR-Driven Robotic Proxy,” which was first presented at the ACM Symposium on User Interface Software and Technology (UIST), held October 29th through November 1st in San Francisco.
Isa Muhammad is a writer and video game journalist covering many aspects of entertainment media including the film industry. He's steadily writing his way to the sharp end of journalism and enjoys staying informed. If he's not reading, playing video games or catching up on his favourite TV series, then he's probably writing about them.
